Krokový motor
Krokový motor (Stepper Motor, Schrittmotor) je indukční synchronní točivý stroj. Magnetické pole, které slouží k otáčení rotoru, je generováno postupným zapínáním napájení jednotlivých cívek – elektromagnetů – příslušných pólových dvojic statoru. Pólové nástavce rotoru a statoru jsou vzájemně posunuty, takže při vyvolání magnetického pole ve statoru se rotor pootočí právě o rozdíl vzdálenosti (úhlu) mezi příslušnými pólovými nástavci statoru a rotoru. Rotor se tedy pohybuje po krocích, jejichž velikost (úhel natočení) je dána konstrukcí motoru a způsobem generování řídících impulsů. Krokový motor umožňuje velmi přesné polohování. Lze ho označit jako digitální motor. [1], [2]
Krokové motory rozlišujeme:
-
Podle způsobu vinutí na:
- Unipolární – proud může téci cívkou pouze jedním směrem.
- Bipolární – proud může téci cívkou oběma směry.
Obr. 1: Unipolární krokový motor [8]
Obr. 2: Bipolární krokový motor [8]
-
Podle počtu vinutí na:
- Dvoufázové – standardní, nejpoužívanější
- Vícefázové – speciální pohony – nižší vibrace, jemnější krok, složitější konstrukce, vyšší cena
-
Podle stavby rotoru na:
- Reluktanční (reluktance = magnetický odpor) motory využívají schopnosti magnetického obvodu natáčet se vždy do mechanické konfigurace s co nejmenší energií (co nejmenším magnetickým odporem). Vhodně tvarovaný magnetický obvod se zuby z magneticky vodivého materiálu se vždy natočí těmito zuby pod póly statoru s cívkami (zdroji magnetického toku), aby zvýšil magnetický tok a snížil magnetický odpor (reluktanci) celé konstrukce. Pouštěním proudu do cívek (nejjednodušeji zapínáním a vypínáním cívek) je potom možné s rotorem pohybovat.
- Motor s permanentními magnety využívá magnetického pole vytvořeného permanentními magnety, v magnetickém obvodu se potom objevuje daleko větší magnetický tok a motor je daleko "živější”. Severní a jižní póly pak vytvářejí různě směrované toky po celém motoru a vhodným elektrickým proudem se pak motor roztáčí v různém směru.
- Hybridní znamená, že tento motor v sobě kombinuje dva typy motorů - reluktanční a motor s permanentními magnety. Hybridní krokový motor má vinutí ve statoru, permanentní magnet mezi částmi rotoru a vzduchovou mezeru mezi rotorem a statorem. Kuličková ložiska jsou pak jedinou třecí plochou při otáčení motoru.
Konstrukce krokového motoru
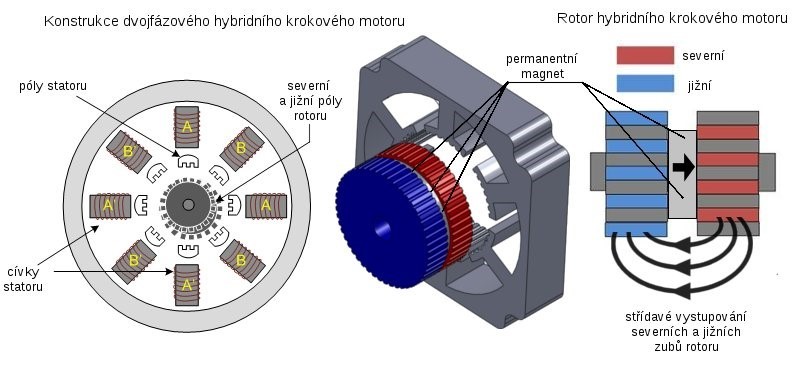
Obr. 3: Konstrukce krokového motoru [8]
Na obrázku je znázorněna konstrukce hybridního dvoufázového motoru. Je zde patrné uspořádání cívek a jejich pólových nástavců statoru a umístění permanentních magnetů na rotoru motoru.
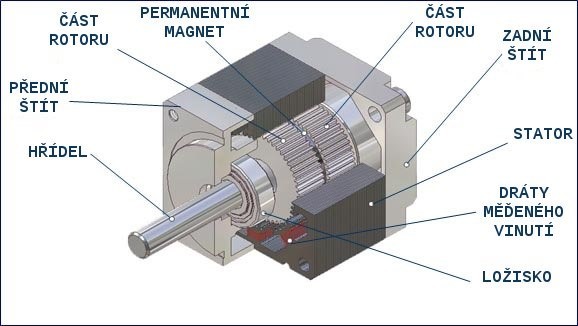
Obr. 4: Sestava krokového motoru [8]
Zde je typická sestava krokového motoru. Jediné mechanicky namáhané součásti, které se opotřebovávají, jsou ložiska hřídele.

Obr. 5: Rozložený krokový motor [9]
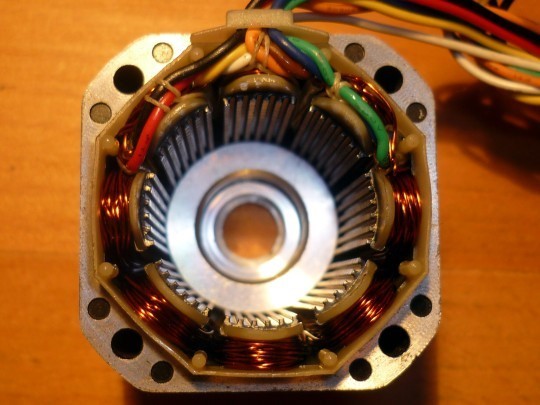
Obr. 6: Detail umístění cívek statoru a jejich pólů. Jsou zde patrny jednotlivé „zuby“ [9]

Obr. 7: Detail rotoru krokového motoru. Na obrázku je patrné umístění a vzájemné posunutí permanentních magnetů [9]
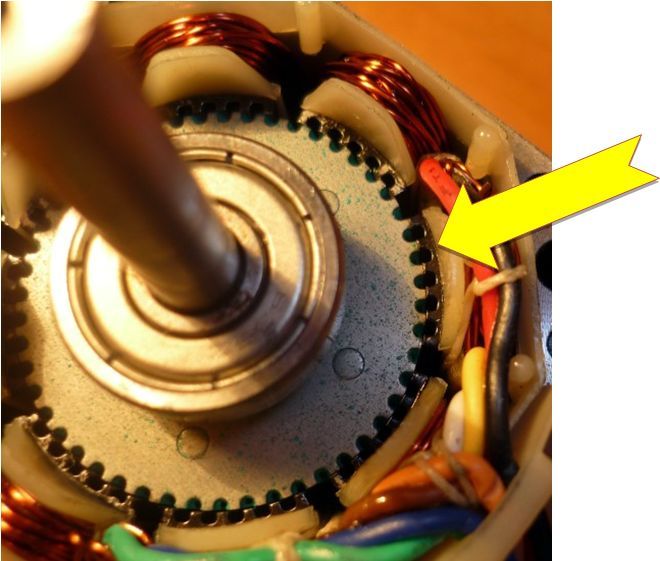
Obr. 8: Detail rotoru a jeho polohy vůči statoru. Shodné natočení „zubů“ označuje šipka. [9]
Elektrické vlastnosti a schéma krokového motoru
Elektrické obvody krokového motoru se skládají ze dvou cívek (u dvoufázového motoru – nejčastější případ), které jsou napájeny stejnosměrným proudem. Jediný prvek, který omezuje velikost procházejícího proudu, je tedy pouze odpor vodiče cívky. Jelikož cívky mají relativně malý odpor, motor má tendenci se za provozu silně zahřívat. Z principu vyplývá, že motorem teče proud, i když se rotor nepohybuje. Tuto skutečnost je nutné mít na zřeteli při návrhu řídícího obvodu a proud procházející motorem vhodným způsobem regulovat, případně motor chladit. Pro regulaci se nejčastěji používá pulsní šířková modulace (PWM – Pulse Width Modulation). [3], [4]
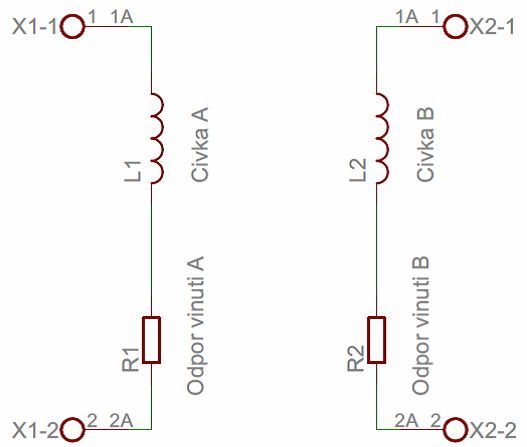
Obr. 9: Náhradní elektrické schéma dvojfázového krokového motoru [10]
Cívka A je rozdělena do více sekcí, které jsou umístěny po obvodu statoru střídavě se sekcemi cívky B.
Ovládací elektrické obvody krokového motoru
Jednotlivé cívky se u bipolárního motoru nejčastěji ovládají tranzistorovým můstkem složeným z bipolárních nebo unipolárních tranzistorů. Při návrhu koncového stupně je nutné nezapomenout na ochranu spínacích prvků proti napěťovým špičkám, vznikajícím při spínání a odepínání indukčnosti. Tyto můstky bývají spolu s ochranami a budícími obvody součástí speciálních integrovaných obvodů, jejichž popis přesahuje rámec tohoto textu. Podrobnosti o nich najde zájemce na webových stránkách výrobců (STM, Allegro, TI apod.). [5]

Obr. 10: Základní H-můstek [8]
Obr. 11: Proud tekoucí fází A [8]
Obr. 12: Proud tekoucí fází B [8]
Průběh napětí a proudu v cívce při použití PWM
Je důležité nepřekročit maximální proud motoru. Budič, který využívá tento princip – chopper, je zpravidla vybaven snímacími rezistory v obvodu cívky, a tak lze pohodlně nastavit jmenovitou hodnotu proudu motoru. Další zvyšování proudu již nemá zpravidla vliv na zvyšování kroutícího momentu motoru, pouze se zvyšuje ztrátový výkon díky hysterezi magnetického obvodu.
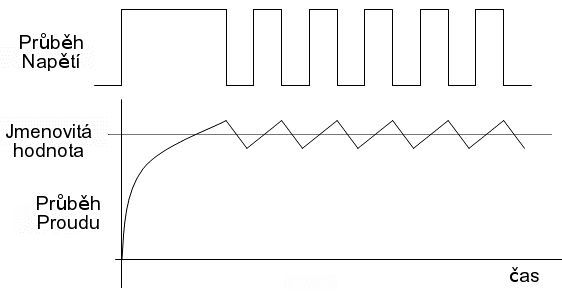
Obr. 13: Průběh napětí a proudu v cívce při použití PWM [8]
Řízení unipolárního motoru
Obr. 14: Princip řízení unipolárního motoru [8]
- Unipolární dvoufázové řízení s plným krokem
 |
 |
 |
 |
|
| Cívka 1 | - | 0 | 0 | 0 |
| Cívka 2 | 0 | - | 0 | 0 |
| Cívka 3 | 0 | 0 | - | 0 |
| Cívka 4 | 0 | 0 | 0 | - |
Animaci naleznete zde.
- Unipolární dvoufázové řízení s polovičním krokem
 |
 |
 |
 |
|
| Cívka 1 | - | 0 | 0 | - |
| Cívka 2 | - | - | 0 | 0 |
| Cívka 3 | 0 | - | - | 0 |
| Cívka 4 | 0 | 0 | - | - |
Animaci naleznete zde.
- Unipolární řízení s polovičním krokem
 |
|
|
 |
 |
 |
 |
 |
|
| Cívka 1 | - | - | 0 | 0 | 0 | 0 | 0 | - |
| Cívka 2 | 0 | - | - | - | 0 | 0 | 0 | 0 |
| Cívka 3 | 0 | 0 | 0 | - | - | - | 0 | 0 |
| Cívka 4 | 0 | 0 | 0 | 0 | 0 | - | - | - |


Animaci naleznete zde.
Řízení bipolárního motoru
Obr. 15: Princip řízení bipolárního motoru [8]
- Bipolární jednofázové řízení s plným krokem
 |
 |
 |
 |
|
| Cívka 1 | - | 0 | + | 0 |
| Cívka 2 | 0 | - | 0 | + |
| Cívka 3 | + | 0 | - | 0 |
| Cívka 4 | 0 | + | 0 | - |
Animaci naleznete zde.
- Bipolární dvojfázové řízení s plným krokem
 |
 |
 |
 |
|
| Cívka 1 | - | + | + | - |
| Cívka 2 | - | - | + | + |
| Cívka 3 | + | - | - | + |
| Cívka 4 | + | + | - | - |
Animaci naleznete zde.
- Bipolární řízení s polovičním krokem
 |
 |
 |
 |
 |
 |
 |
 |
|
| Cívka 1 | - | - | 0 | + | + | + | 0 | - |
| Cívka 2 | 0 | - | - | - | 0 | + | + | + |
| Cívka 3 | + | + | 0 | - | - | - | 0 | + |
| Cívka 4 | 0 | + | + | + | 0 | - | - | - |
Animaci naleznete zde.
Kromě uvedených způsobů lze pro ovládání každého krokového motoru použít tzv. mikrokrokování. Lze toho dosáhnout regulací proudu, který protéká cívkou A a cívkou B. Určitý poměr proudů do fází A a B donutí motor krokovat i do oblastí, kam by se přirozeně nedostal (magnetické pole cívky A a cívky B má různou, proměnnou intenzitu). Motor je pak schopen pracovat s menším krokem, než na jaký je konstruován pro plný krok, pohyb je plynulejší, chod motoru tišší. Tento způsob řízení vyžaduje specializované integrované obvody a řídící jednotky. [6]
Mechanické vlastnosti krokového motoru
Krokový motor umožňuje velmi precizní řízení a polohování bez použití zpětné vazby – např. enkodérem. Může být použit v širokém spektru rychlostí, rychlost lze precizně řídit kmitočtem řídících pulzů. Má velmi výhodnou momentovou charakteristiku při malých rychlostech, takže jej lze použít pro přímé ovládání zátěže bez převodovky. Při nulové rychlosti disponuje přídržným momentem, který udrží ovládanou zátěž ve stabilní poloze.
Největší nevýhodou krokového motoru je možnost ztráty kroku, pokud je překročena hodnota maximálního kroutícího momentu motoru. Tuto skutečnost je nutno mít na paměti při výběru motoru pro danou zátěž a při řízení a brždění motor postupně zrychlovat a zpomalovat (rozjezdové a dojezdové rampy). Je třeba si uvědomit, že moment vzniká i při roztáčení hmotného tělesa z klidové polohy. [7]
Použití krokových motorů
Krokové motory se používají všude tam, kde je potřeba precizního a opakovatelného polohování. Např.:
- řízení os obráběcích strojů
- klouby robotů a manipulátorů
- výpočetní technika
- fotografické přístroje
- automatizace
Zdroje
[1] Wikipedia. Stepper Motor [online]. [cit. 2014-8-16]. Dostupný na www: http://en.wikipedia.org/wiki/Stepper_motor#Higher-phase_count_stepper_motors
[2] Autor neznámý. Stepper Motor Hardware Interfacing [online]. [cit. 2014-8-16]. Dostupný na www: http://www.piclist.com/techref/io/steppers.htm
[3] Autor neznámý. Princip - krokový motor [online]. [cit. 2014-8-16]. Dostupný na www: http://www.pohonnatechnika.cz/skola/motory/krokovy-motor
[4] LMS software. Krokový motor - princip [online]. [cit. 2014-8-16]. Dostupný na www: http://www.mylms.cz/text-krokovy-motor-princip/
[5] SERVO-DRIVE s.r.o. Speciální krokové motory na míru [online]. [cit. 2014-8-16]. Dostupný na www: http://www.servo-drive.com/specialni_krokove_motory_krokove_motory_na_miru.php
[6] Autor neznámý. www.robotika.cz [online]. [cit. 2014-8-16]. Dostupný na www: http://robotika.cz/articles/steppers/cs
[7] Firemní stránky MICROCON, s.r.o. [online]. [cit. 2014-8-16]. Dostupný na www: http://www.microcon.cz/
Obrázky
[8] SERVO-DRIVE s.r.o. Speciální krokové motory na míru [online]. [cit. 2014-8-16]. Dostupný na www: http://www.servo-drive.com/specialni_krokove_motory_krokove_motory_na_miru.php
[9] LMS software. Krokový motor - princip [online]. [cit. 2014-8-16]. Dostupný na www: http://www.mylms.cz/text-krokovy-motor-princip/
[10] Archív autora.


