Jednoduché regulátory
Regulátor můžeme znázornit blokovým schématem:
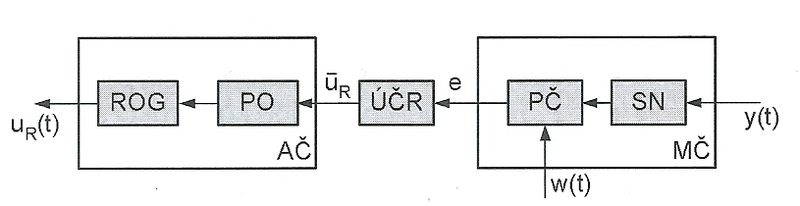
Obr. 1: Blokové schéma nepřímého regulátoru
Snímač SN měří skutečnou hodnotu regulované veličiny a v porovnávacím členu PČ se zjišťuje její rozdíl od žádané hodnoty. Snímač a porovnávací člen tvoří měřicí člen MČ. Ústřední člen regulátoru ÚČR zpracovává regulační odchylku podle určitého předpisu a do regulované soustavy zasahuje prostřednictvím akčního členu AČ, který se skládá z pohonu PO a regulačního orgánu ROG.
Dynamické vlastnosti určuje ústřední člen regulátoru, který je u elektronických regulátorů realizován operačním zesilovačem s vhodnou zpětnou vazbou.
Regulátor P – proporcionální
Regulátor P pouze zesiluje regulační odchylku, takže velikost akční veličiny je přímo úměrná velikosti regulační odchylky. Pracuje s trvalou regulační odchylkou. Jeho chování můžeme popsat diferenciální rovnicí
kde kR je zesílení regulátoru.
Z obrazu rovnice

stanovíme obrazový přenos
Odpovídající přechodová a frekvenční charakteristika:

Obr. 2: Charakteristiky regulátoru P
Z frekvenční charakteristiky vyplývá, že regulátor je frekvenčně nezávislý.
U regulátoru P je jako stavitelný parametr používáno pásmo proporcionality
které určuje, o jakou hodnotu v procentech se musí změnit vstupní signál regulátoru, aby se akční člen přestavil z jedné krajní polohy do druhé.
Pro realizaci ústředního členu použijeme invertující operační zesilovač s odporovou zpětnou vazbou:

Obr. 3: Schéma zapojení regulátoru P
Regulátor I – integrační
Regulátor I regulační odchylku integruje, takže po určité době dojde k jejímu odstranění. Rychlost, s jakou se mění akční veličina, je přímo úměrná velikosti regulační odchylky. Dynamické vlastnosti vyjadřuje diferenciální rovnice
kde TI je integrační časová konstanta.
Z obrazu rovnice

vyjádříme obrazový přenos
Chování regulátoru můžeme znázornit přechodovou a frekvenční charakteristikou:

Obr. 4: Charakteristiky regulátoru I
Z frekvenční charakteristiky vyplývá, že přenos klesá s rostoucí frekvencí.

Obr. 5: Schéma zapojení regulátoru I
Regulátor D – derivační
Regulátor D se nepoužívá samostatně, protože velikost akční veličiny je přímo úměrná rychlosti, s jakou se mění regulační odchylka. Připustí libovolně velkou ustálenou odchylku.
Vlastnosti popisuje diferenciální rovnice
kde TD je derivační časová konstanta.
Po převedení rovnice do obrazu

vyjádříme obrazový přenos
Odpovídající přechodová charakteristika a frekvenční charakteristika:

Obr. 6: Charakteristiky regulátoru D
Regulátor D nemůže být realizován jako ideální, protože se uplatňují parazitní setrvačnosti, takže zapojení ústředního členu odpovídá reálná přechodová charakteristika (T je setrvačná časová konstanta):
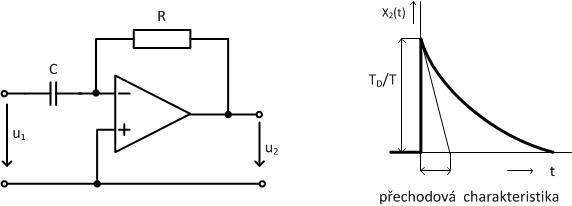
Obr. 7: Schéma zapojení a přechodová charakteristika skutečného regulátoru D
Charakteristika činnosti jednoduchých regulátorů:
P – pracuje s trvalou regulační odchylkou (její velikost je nepřímo úměrná zesílení), přispívá ke stabilitě obvodu.
I – odstraňuje regulační odchylku, vhodný tam, kde nejsou příliš časté poruchy, nemůže být použit pro regulaci astatických soustav (nevyhoví stabilitě obvodu).
D – není schopen samostatné funkce, protože reaguje pouze na měnící se regulační odchylku, ve spojených regulátorech přispívá ke stabilitě a zlepšuje rychlost reakce regulátoru.
Zdroje
-
BALÁTĚ, Jaroslav. Automatické řízení. 2. přepracované vyd. Praha: BEN – technická literatura,2004, 664s. ISBN 80-7300-148-9.
Obrázky
-
Obr. 1: BALÁTĚ, Jaroslav. Automatické řízení. 2. přepracované vyd. Praha: BEN – technická literatura,2004, 664s. ISBN 80-7300-148-9.
-
Obr. 2, 3, 4, 5, 6 a 7: Archiv autora
Kontrolní otázka
Která část regulátoru určuje jeho dynamické vlastnosti?
Kontrolní otázka
Jak reagují regulátory P,I,D na regulační odchylku?
Kontrolní otázka
Proč se regulátor D nepoužívá samostatně?


