Číslicový regulační obvod
Pro číslicové (diskrétní) řízení je charakteristické, že signály jsou definovány pouze v určitých časových okamžicích určených tzv. periodou vzorkování. Základem řídícího členu je mikropočítačová jednotka. Většina technických prostředků současné automatizace pracuje na principech diskrétního řízení, které má proti klasickému (spojitému) řízení řadu výhod. K hlavním výhodám patří:
- Centralizace a decentralizace řídících prostředků.
Řídící obvod lze rozdělit na několik vzájemně spolupracujících celků na různých úrovních propojených průmyslovými komunikačními linkami (distribuovaný řídící systém).
-
Velká spolehlivost.
-
Snadná změna algoritmu řízení.
Změny dosáhneme změnou programu, zatímco v klasickém řízení musíme měnit zapojení.
-
Parametry regulátorů mohou být nastavovány programově (automatické nastavení, adaptivní mechanismy).
-
Snadný přenos informace na velké vzdálenosti.
Binárně kódovaná data jsou odolnější vůči rušení než analogová data.
- Snadnější nastavení, oživení a montáž řídících systémů, vybavení diagnostickými nástroji.
Blokové schéma číslicového regulačního obvodu
Princip číslicového regulačního obvodu je stejný jako u spojitého řízení, tj. regulátor působí na regulovanou soustavu prostřednictvím akční veličiny s cílem minimalizovat regulační odchylku. Liší se však tvarem a způsobem zpracování signálů.
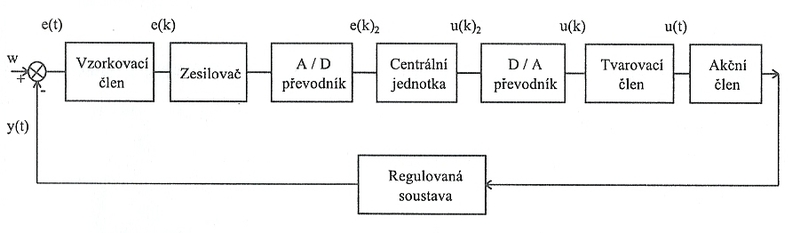
Obr. 1: Struktura číslicového regulačního obvodu
Vzorkovací člen periodicky testuje vstupní analogový signál, výstupním signálem je posloupnost impulzů zanedbatelné šířky s amplitudou rovnou okamžité hodnotě vstupního signálu. Vzorkovací perioda T musí být dostatečně dlouhá, aby regulátor mohl provést požadované činnosti (načtení vstupů, výpočty odchylky, akční veličiny, tvarování výstupních signálů atd.), ale s rostoucí periodou vzorkování dochází ke zhoršení kvality a přesnosti výstupního signálu.
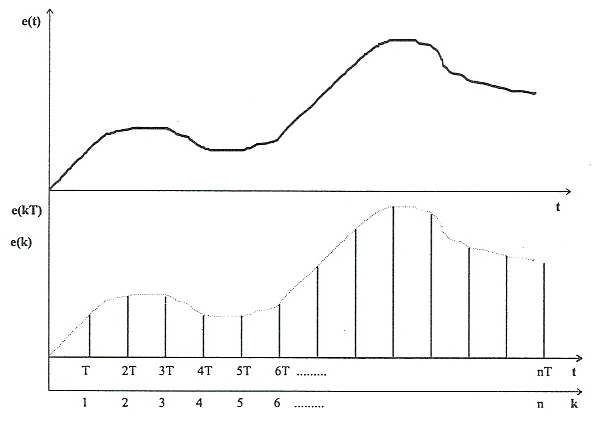
Obr. 2: Princip vzorkování
Zesilovač určuje rozsah pro daný vstup.
Analogově digitální převodník transformuje posloupnost impulzů na posloupnost číselných hodnot v binárním kódu. Řídící systémy zpracovávají mnoho vstupních signálů, které se ke vstupním obvodům přepínají pomocí multiplexeru.
Centrální jednotka provádí výpočet akčních veličin a pomocí výstupních obvodů zasahuje do regulované soustavy. Dále se kontrolují mezní hodnoty veličin a při překročení se generují tzv. alarmy, které vhodnou signalizací informují obsluhu, archivují se data, mohou se provádět materiálové a energetické výpočty (řízení spotřeby), přepočet snímaných signálů do příslušných fyzikálních jednotek atd.
Digitálně analogový převodník transformuje výstupní číselné hodnoty na posloupnost impulzů.
Tvarovací člen upravuje diskrétní signál na tvar vhodný pro spojitou soustavu. Vytváří tedy signál, který je spojitý po dobu periody vzorkování. Příkladem může být tvarovač 0. řádu, který vytvoří stupňovitý signál:

Obr. 3: Vznik stupňovité funkce
Teorie číslicových regulačních obvodů
Pro popis číslicového regulačního obvodu nemůžeme použít diferenciální rovnice, protože signály nejsou spojité. K popisu diskrétních obvodů se používají diferenční rovnice, které jsou funkcí proměnné k·T ( případně k). Diferenční rovnice lze odvodit z diferenciálních pomocí Laplaceovy transformace s nenulovými počátečními podmínkami. Diferenční rovnice členu umožňuje výpočet okamžitých hodnot výstupní veličiny v časech t = k·T, kde k = 0, 1, 2, 3,….. a T je perioda vzorkování.
Příklad: Diferenční rovnice jednokapacitní regulované soustavy:

Novou hodnotu y(k) vypočteme z hodnoty vstupu i výstupu v minulém vzorkování. Číselné hodnoty koeficientů a, b, které vyjadřují vlastnosti soustavy, platí pouze pro určitou vzorkovací frekvenci.
Řešení diferenčních rovnic může být provedeno
-
numericky, kdy se postupně počítají hodnoty výstupního signálu, jak by se objevovaly na výstupu členu v okamžicích k = 0, 1, 2, 3,….atd., nevýhodou je, že při výpočtu vzorku s pořadovým číslem 1000 musí být vypočteny hodnoty všech předchozích 999 vzorků,
-
pomocí Z transformace, která je obdobou Laplaceovy tranformace ze spojité oblasti, kde je výsledkem obecný vztah, ze kterého se hodnota vzorku vypočte přímo bez výpočtu předchozích.
Zdroje
-
BALÁTĚ, Jaroslav. Automatické řízení. 2. přepracované vyd. Praha: BEN – technická literatura, 2004, 664s. ISBN 80-7300-148-9.
-
VORÁČEK, Rudolf, František ANDRÝSEK, Zdeněk BRÝDL, Luděk KOHOUT a Ladislav ŠMEJKAL. Automatizace a automatizační technika II. 1.vyd. Praha: Computer Press, 2000, 218s. ISBN 80-7226-247-5.
Obrázky
-
Obr. 1, 2 a 3: VORÁČEK, Rudolf, František ANDRÝSEK, Zdeněk BRÝDL, Luděk KOHOUT a Ladislav ŠMEJKAL. Automatizace a automatizační technika II. 1.vyd. Praha: Computer Press, 2000, 218s. ISBN 80-7226-247-5.
-
Obr. 4: Archiv autora
Kontrolní otázka
Čím se liší číslicové řízení od spojitého a jaké má výhody?
Kontrolní otázka
K čemu slouží vzorkovací člen?
Kontrolní otázka
Jaká je úloha tvarovacího členu?
Kontrolní otázka
Jakým typem rovnic popisujeme chování číslicových regulačních obvodů?
Obrázek

Obr. 4:Průmyslové číslicové regulátory


